Puesta en Marcha Virtual de un Sistema Integrado de Cobots, Robots Industriales y AGVs

Puesta en Marcha Virtual de un Sistema Integrado de Cobots, Robots Industriales y AGVs: Optimización de la Automatización y Eficiencia Operativa
Automoción OBJETIVOEl objetivo principal era validar y optimizar el funcionamiento conjunto de cobots, robots industriales y AGVs dentro de un entorno virtual, con el fin de asegurar una integración sin problemas y maximizar la eficiencia operativa. Se buscaba reducir el tiempo de puesta en marcha real, minimizar interrupciones y garantizar que el sistema integrado operara con la máxima eficacia desde el primer momento.
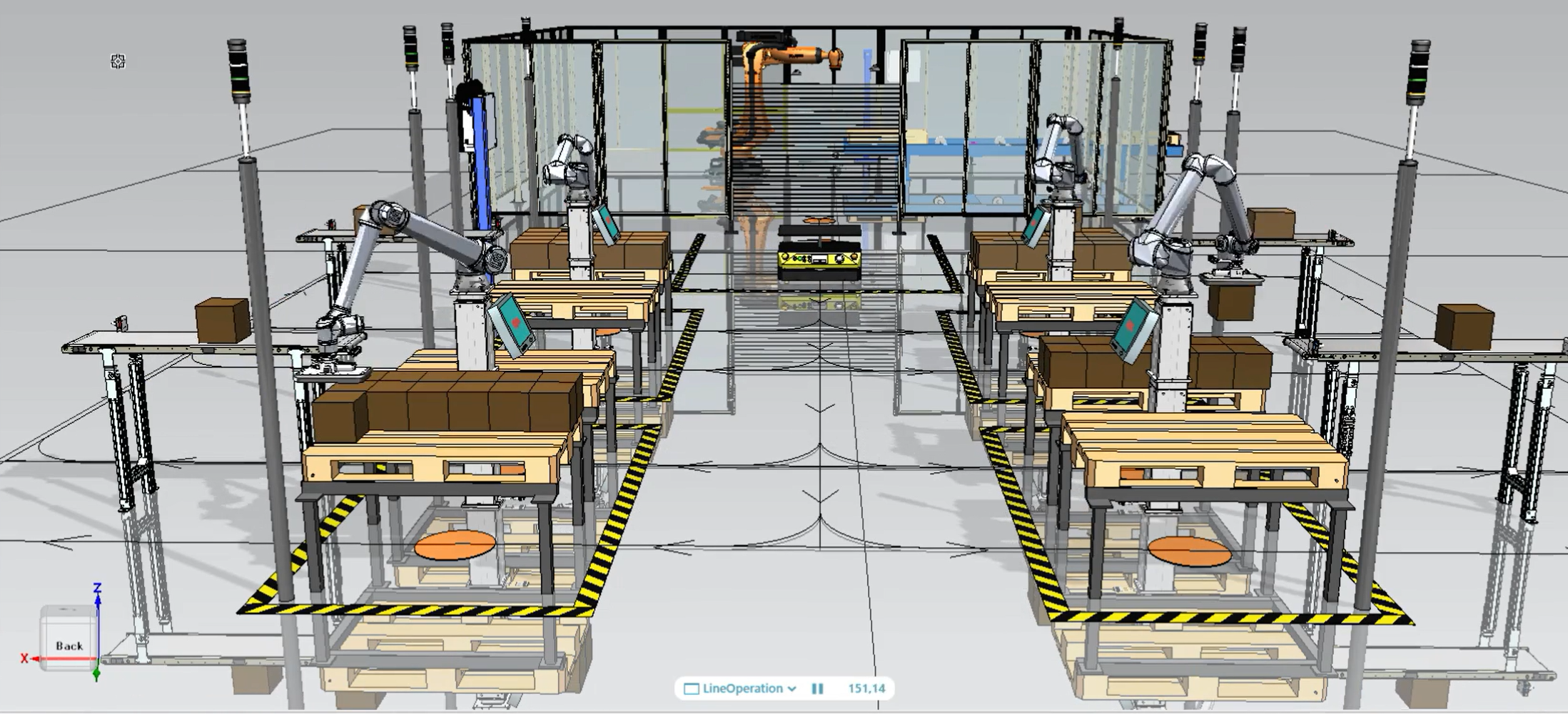
Se realizó una puesta en marcha virtual de un complejo sistema que integra cobots (robots colaborativos), robots industriales y vehículos guiados automatizados (AGVs). La simulación abarcó la interacción y coordinación entre estos componentes clave para optimizar el flujo de trabajo y la eficiencia en la planta. Esta puesta en marcha virtual permitió afinar los procesos, depurar el código de control y garantizar una integración fluida antes de la implementación física del sistema.

BENEFICIOS DEL PROYECTO
 Optimización de la Integración de SistemasReducción de Costos y Tiempo de ImplementaciónMejora en la Eficiencia OperativaMinimización de RiesgosDepuración y Ajuste del Código
Optimización de la Integración de SistemasReducción de Costos y Tiempo de ImplementaciónMejora en la Eficiencia OperativaMinimización de RiesgosDepuración y Ajuste del CódigoEl objetivo principal era validar y optimizar el funcionamiento conjunto de cobots, robots industriales y AGVs dentro de un entorno virtual, con el fin de asegurar una integración sin problemas y maximizar la eficiencia operativa. Se buscaba reducir el tiempo de puesta en marcha real, minimizar interrupciones y garantizar que el sistema integrado operara con la máxima eficacia desde el primer momento.